Continuing to work up the stack from my LEGO physical vent manipulator(V1), (V2), I decided to do something new for the embedded control software part of this solution and employ an Expressif ESP8266-based chipset and an accompanying L293D H-bridge daughterboard, primarily because they are just ridiculously cheap.
It took a little bit of finessing to find out exactly what to search eBay for (try ESP-12E + L293D) but listings like this, for AUD$12.55 including postage are simply incredible value. That's an 80MHz processor, motor driver board, USB cable and motor cable, all for less than I probably paid for the serial cable I would have used for my primitive robotics exercises back in university. Absolutely extraordinary.
As this setup uses the "NodeMCU" framework, it can be developed in the Arduino Studio IDE that I've used previously for Arduino experiments, in Arduino's C++-esque language that is simultaneously familiar, but also not ...

But I digress. The real trick with this board package is deducing from the non-existent documentation, exactly what you have and how it's meant to be used. For this particular combination, it's a "Node MCU 1.0 (ESP-12E Module)" that is accessed by using the CP210x "USB to UART" port driver available here. Once you've got the board installed, you can browse example code that should work perfectly for your hardware under File -> Examples -> Examples for NodeMCU 1.0. There's a generous selection here, all the way from "Blink" (which, as the "Hello World" of hardware, should always be the first sketch your hardware runs) all the way to "ESP8266WebServer" - which unsurprisingly ended up being the perfect jumping-off point for my own firmware.
After a frustrating and time-consuming detour getting the device to join my WiFi network (it transpires that the "Scan" sketch can find the SSIDs of 802.11b/g/n networks, but to actually connect, it's far better to be on 802.11n-only) it was time to drive some output, which meant more Googling to determine exactly how the L293D "Motor Driver Expansion Board" actually connects to the ESP's GPIO, and what that means in terms of software configuration.
Eventually I cobbled together the necessary knowledge from this board datasheet which talks about D1-D4, and the Arduino documentation for NodeMCU which indicates that these symbols should be magically available in my code. Then I took a tour through the ESP8266WebServer example code to find out what handler methods I had available. At last, I was ready to put it all together - as you'll see in the next blog post.
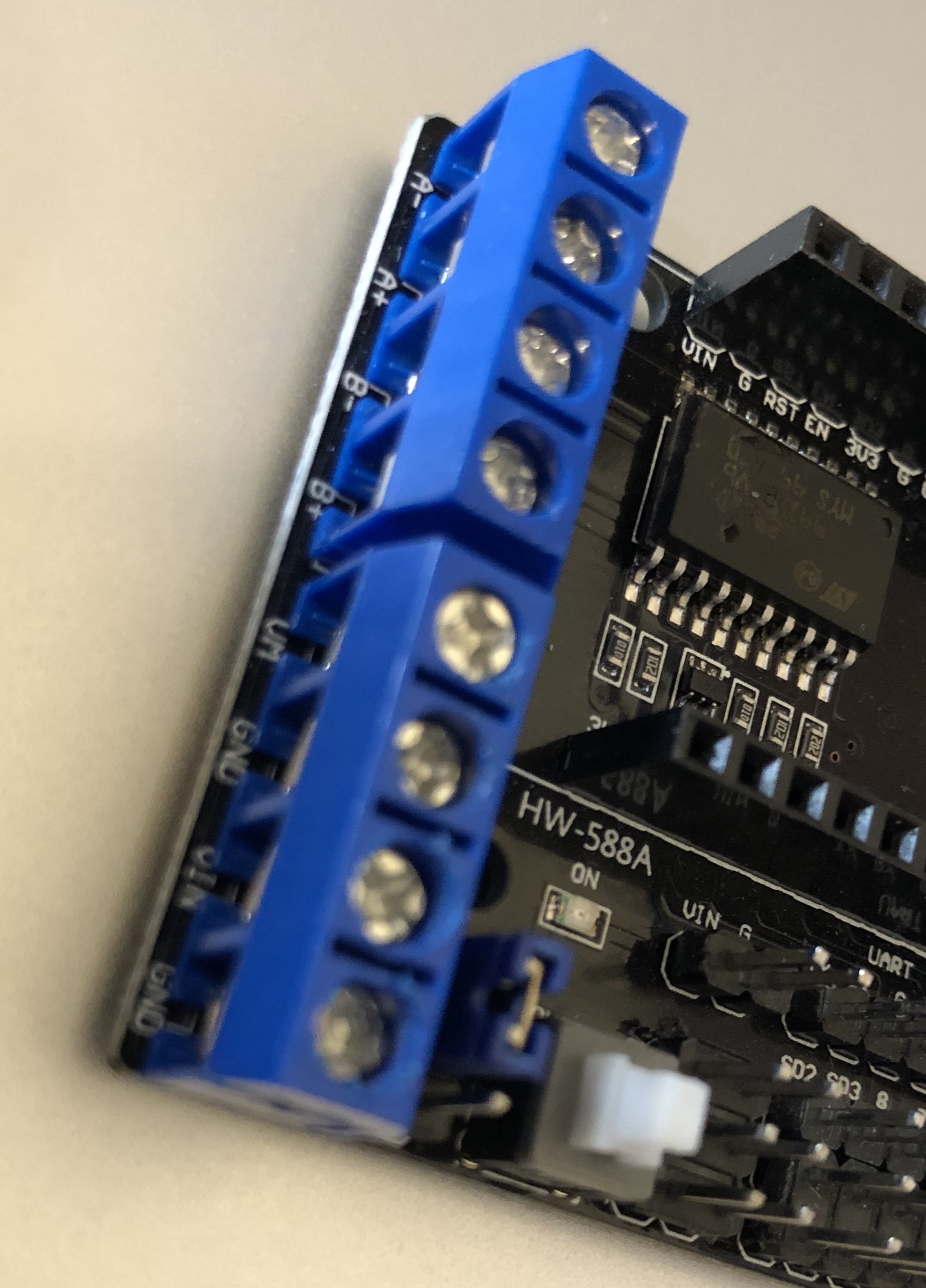
But before then, a cautionary tale - I fried both the motor shield board and an ESP board while developing this, and I suspect it was due to not being able to resist the temptation to run the whole thing off a single power supply. You can do this by moving this jumper to bridge the VIN (for the chip) pin to the VM (for the motor) pin. But I suspect the resulting exposure to back-EMF and all that grubby analogue stuff is not good for either the ESP chip nor the L293D motor driver on the shield board. You've been warned.



No comments:
Post a Comment
Comments welcome - spam is not. Spam will be detected, deleted and the source IP blocked.